
[Research overview]

RESEARCH PROJECT
Development of track-based mobile robot for fire suppresstion
트랙기반 화재 진압용 모바일 로봇 개발
트랙기반 화재 진압용 모바일 로봇 개발

(1) 지원기관 : 소방청
(2) 지원사업 : 소방현장 탐색 및 진압 활동지원센서 및 로봇 기술개발
(3) 세부 지원기관 : 주관 - (주)진우에스엠씨
공동 - (주)피노
공동 - 포항공과대학교
공동 - 금오공과대학교
공동 - 한국로봇융합연구원
공동 - 한국로봇산업협회
공동 - 방재시험연구원
공동 - 한국소방산업기술원
(4) 연구기간: 2023-06-01 ~ 2028-12-31
(5) 연구내용
- 연구제안 배경 :
① 매년 다양한 이유로 크고 작은 화재가 발생하고 있으며, 이로 인해 수많은 인명과 재산 피해가 발생하고 있음
② 최근 5년간(2018~2022) 화재로 인한 인명피해는 매년 2,000명 이상 발생, 재산 피해 금액 또한 매년 증가하여 2021, 2022년에는 1조원에 달함
③ 예측 불허의 각종 재난은 소방관의 인명과 안전을 위협하고 있는 반면, 직접적인 화재진압 작업을 수행하는 소방관의 장비 개선 및 지원은 미비한 상황
- 연구의 필요성 :
① 화재현장에 투입되는 소방관은 유해가스 및 다량의 농연으로 인해 발생하는 암흑 환경에 노출되어 시야와 호흡이 어려움
② 화재현장의 다양한 위험(화염, 붕괴, 유독가스)으로부터 소방관의 안전 보장이 필요
③ 농연 환경에서 시야 확보 및 요구조자의 위치를 탐지하며 화재를 신속하게 진압할 수 있는 첨단 소방로봇의 개발이 필요
④ 협소한 도로, 고정 장애물, 상습 불법 주정차 등의 문제로 진입이 어려운 화재현장에서 운용 가능한 소방로봇 필요
- 연구의 최종목표 :
트랙기반 화재진압용 모바일 로봇 개발 및 소방환경 실증기술 개발
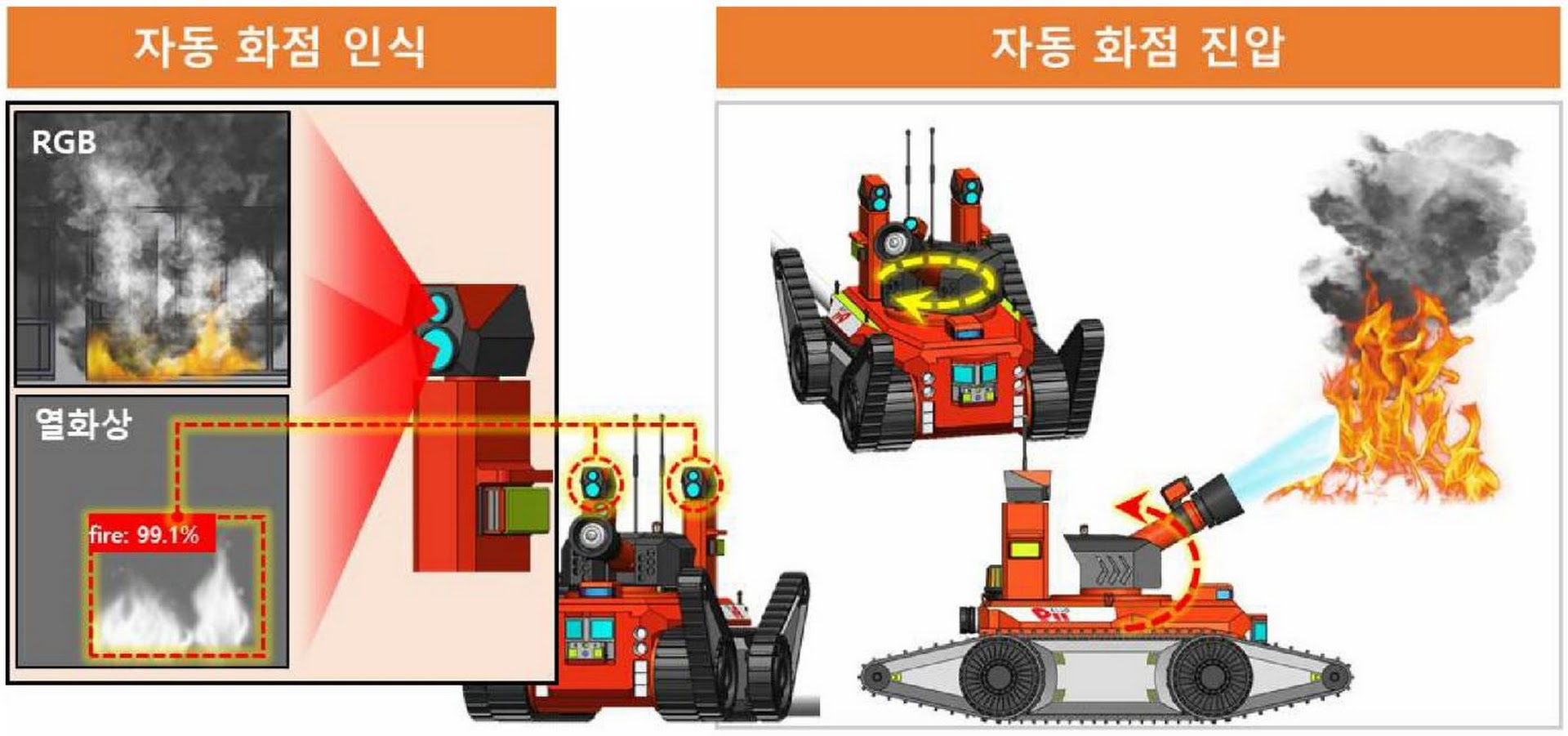
- 세부 목표 1: 영상정보 기반 화염 인식 알고리즘 개발 및 화염 데이터셋 확보
- 세부 목표 2: 실내외 화점 목표 추출 알고리즘 개발 및 열화상 이미지 기반의 화염 인식 학습
- 세부 목표 3: 화점 자동 조준 분사를 위한 방위각/고도각 명령 생성 알고리즘 개발
- 세부 목표 4: 복수의 화점 검출 알고리즘 적용 및 자동 조준 보정 알고리즘 개발
- 세부 목표 5: 소방 환경에서 화재진압 알고리즘 성능 검증/개선